Engineering cameras
CacheCam
EDL cameras
Front Hazcam
Navcam
Rear Hazcam
mission specific
Instrument Overview
Each Engineering Camera (ECAM) is composed of a detector and electronics within a single mechanical housing, specifically: 1) an optical lens assembly, 2) a CMOS image sensor and 3) electronics that includes, a Field Programmable Gate Array, memory, and a legacy interface electronics to the rover. All of the ECAMs are based on a new Enhanced Engineering Camera (EECAM) design, which uses 5120 x 3840, 20 megapixel global shutter CMOS image sensors with a Bayer filter/pattern as shown in the figure below. Because of the electronics commonality, image data from all engineering cameras are functionally equivalent. The cameras have an external film heater that warms up the electronics to above the minimum operating temperature of -55 deg. C. The rover provides supply voltage of +5.5 V to the cameras. Each camera weighs less than 750 grams and uses approximately 4.5 Watts of power.
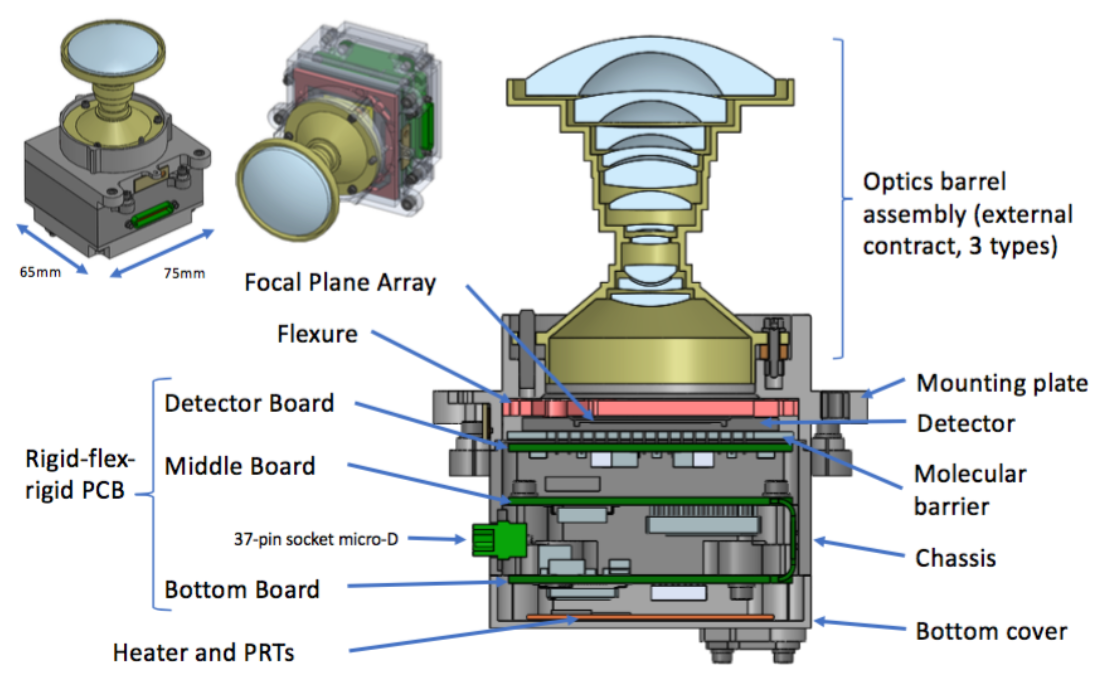
Engineering Camera hardware design
Hazard Avoidance Camera (Hazcam)
The Hazard Avoidance Cameras (Hazcams) are two stereo pairs (front) and one stereo pair (rear) of engineering cameras with fish-eye lenses at 25 cm (front) and 93.4 cm (rear) baseline separation mounted at both the front and rear ends of the Warm Electronics Box (WEB).
The Hazcams provide imaging primarily of the near field (< 5 m) both in front of and behind the rover. These cameras will be used to determine safe driving directions for the rover and provide for on-board hazard detection using stereo data to build range maps. They also support science operations for selecting near field target and robotic arm operations.
Hazcam optics characteristics useful in the analysis of EDR and RDR products are described in the table below.
| Hazcam Operational Characteristics | |
|---|---|
| Characteristic | Value |
| Resolution (S x L) | 5120 x 3840 |
| Bit Depth | 12 |
| Field of View (FOV) | 136 x 102 deg |
| Baseline Stereo Separation | 25 cm for front, 93.4 cm for rear |
| Angular Resolution | 0.46 mrad/pixel at center |
| Pixel Size | 6.4 μm x 6.4 μm |
| Spectral Bandpass | 400 - 675 nm |
| Focal Length | 13.8 mm |
| f/number | 12 |
| Depth of Field | 0.8 m - infinity |
| Best Focus | 1.0 m |
Front Hazcam locations are shown in the first figure below, with the mapping to names in second figure below. Rear Hazcam locations are show in the third figure below. Note that there are two sets of front Hazcams, one connected to each Rover Compute Element (RCE). If RCE-A is active, Front Haz A cameras will be used, while the B cameras are used with RCE-B. There is just one pair of rear Hazcams, with an unusually large baseline since one is on each side of the rover body.
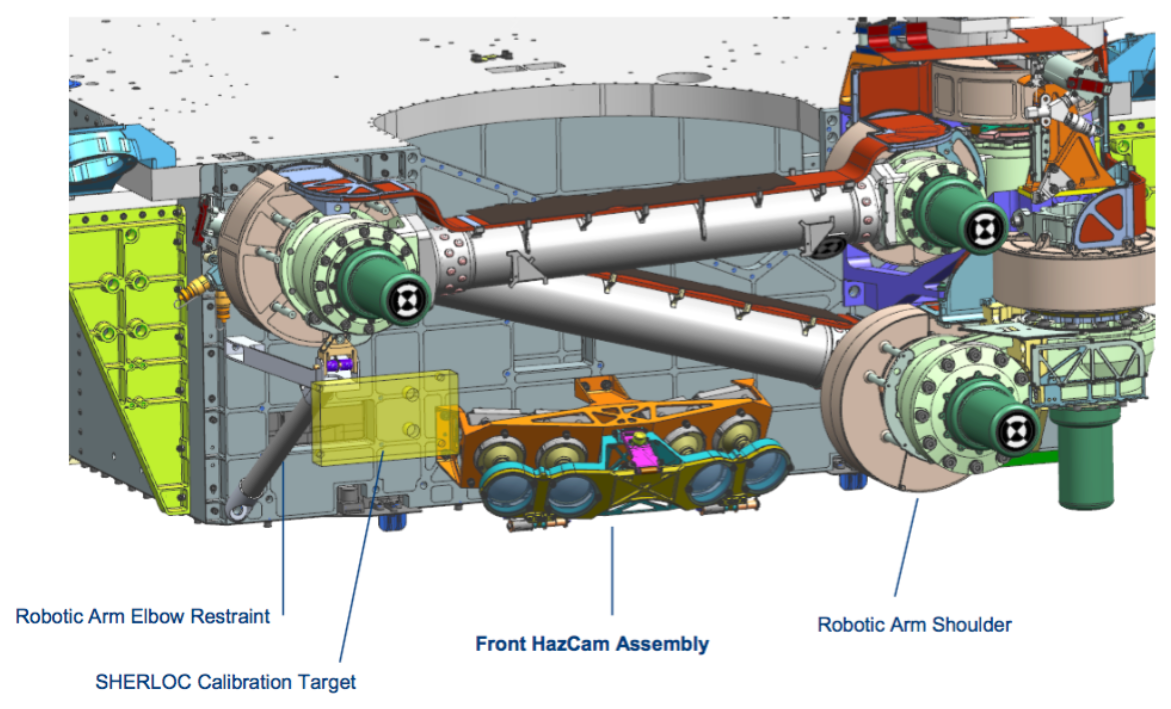
Front Hazcam locations
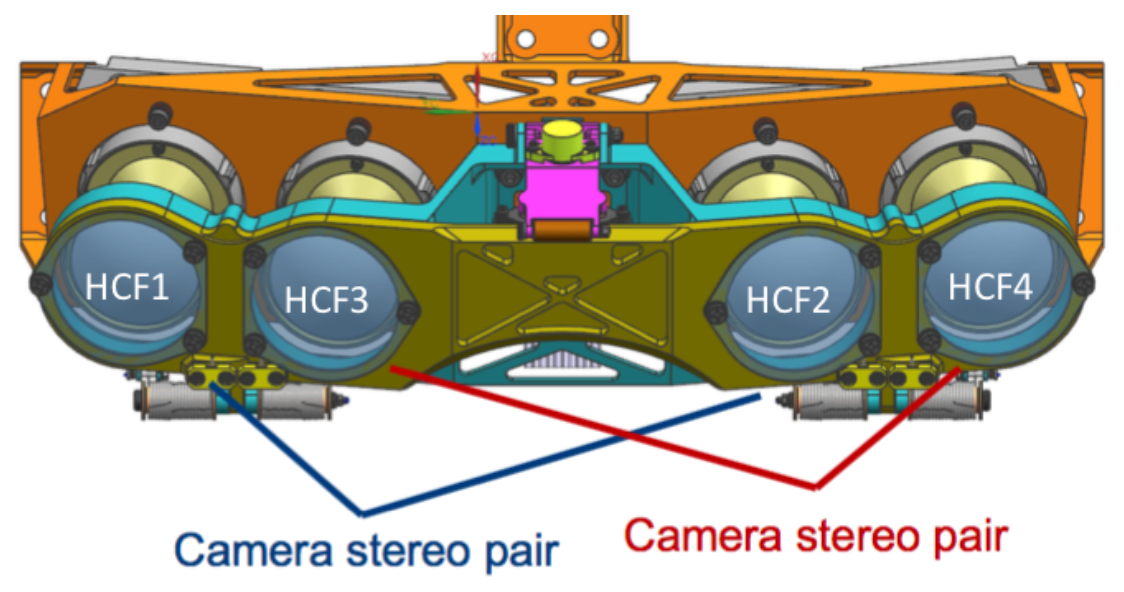
Front Hazcam stereo pair mapping. Blue is the A-side pair, red is the B-side pair.
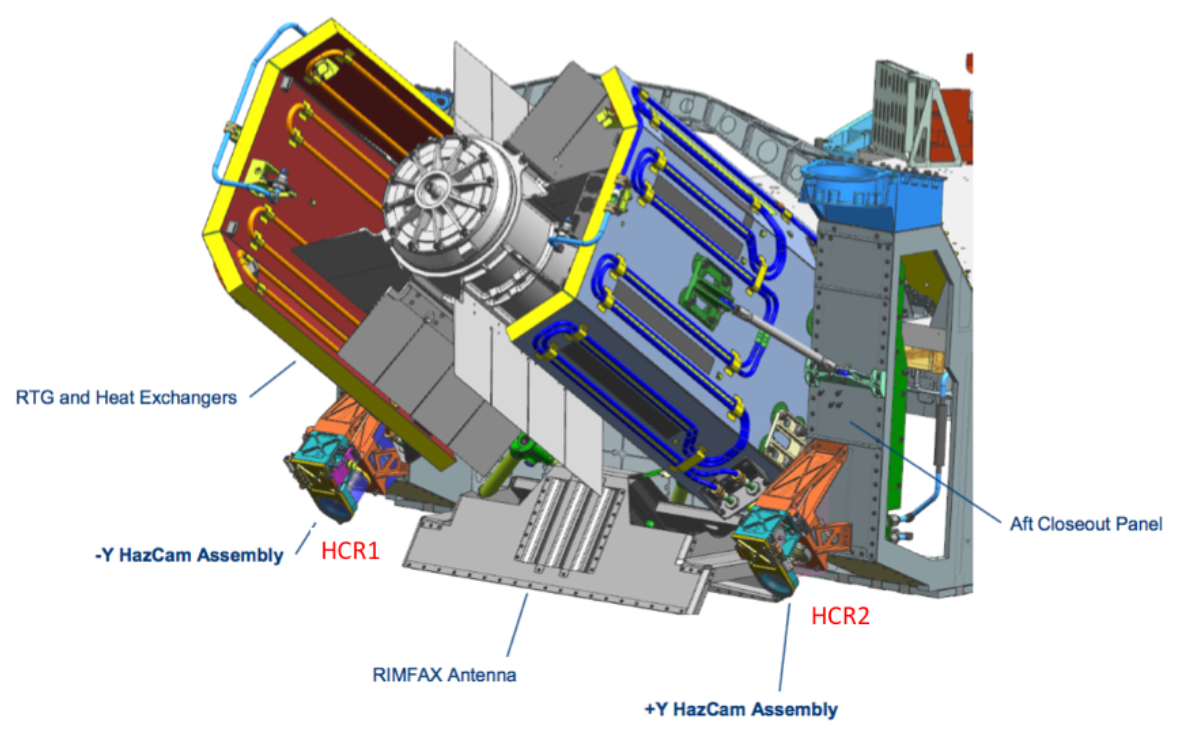
Rear Hazcam location
Navigation Camera (Navcam)
The Navigation Camera (Navcam) is a mast-mounted stereo pair of engineering cameras at 42.4 cm baseline separation with a spectral bandpass at approximately 275 nm (passing longer wavelengths). It will primarily be used for navigation purposes and general site characterization (360° panoramic images and targeted images of interest, including terrain not viewable by the Hazcams).
The cameras are co-boresighted with the Mastcam-Z, and Navcam images will also be used for Science target selection and analysis.
Navcam optics characteristics useful in the analysis of EDR and RDR products are described in the table below, with Navcam location shown in the figure below.
| Navcam Operational Characteristics | |
|---|---|
| Characteristic | Value |
| Resolution (S x L) | 5120 x 3840 |
| Bit Depth | 12 |
| Field of View (FOV) | 96° x 73° |
| Baseline Stereo Separation | 42.4 cm |
| Angular Resolution | 0.33 mrad/pixel at center |
| Pixel Size | 6.4 μm x 6.4 μm |
| Spectral Bandpass | 400 – 675 nm |
| Focal Length | 19.2 mm |
| f/number | 12 |
| Depth of Field | 1.5 m - infinity |
| Best Focus | 3.5 m |
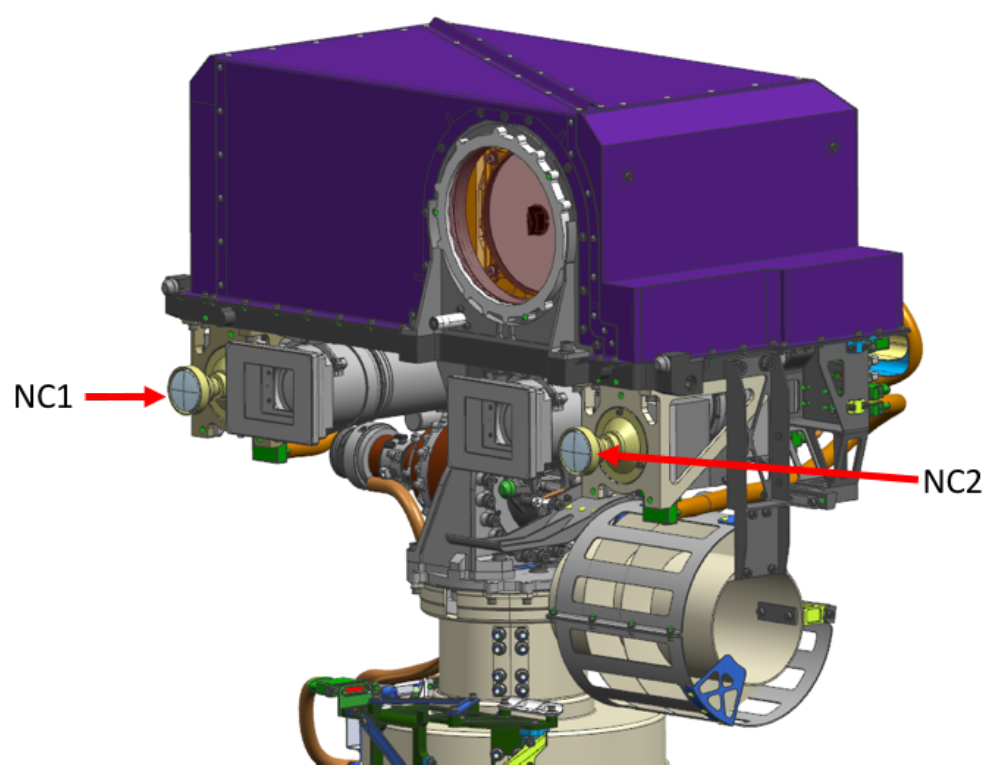
Navcam location
Sample Caching System Camera (CacheCam)
The CacheCam is a single camera mounted inside the body of the rover. It acquires images of the contents of the sample tubes as they are acquired before being sealed. It does not articulate, although the tube carrier can articulate. Note that the CacheCam does not a camera model associated with it. The table below provides the camera characteristics, while figure below shows the location of the camera.
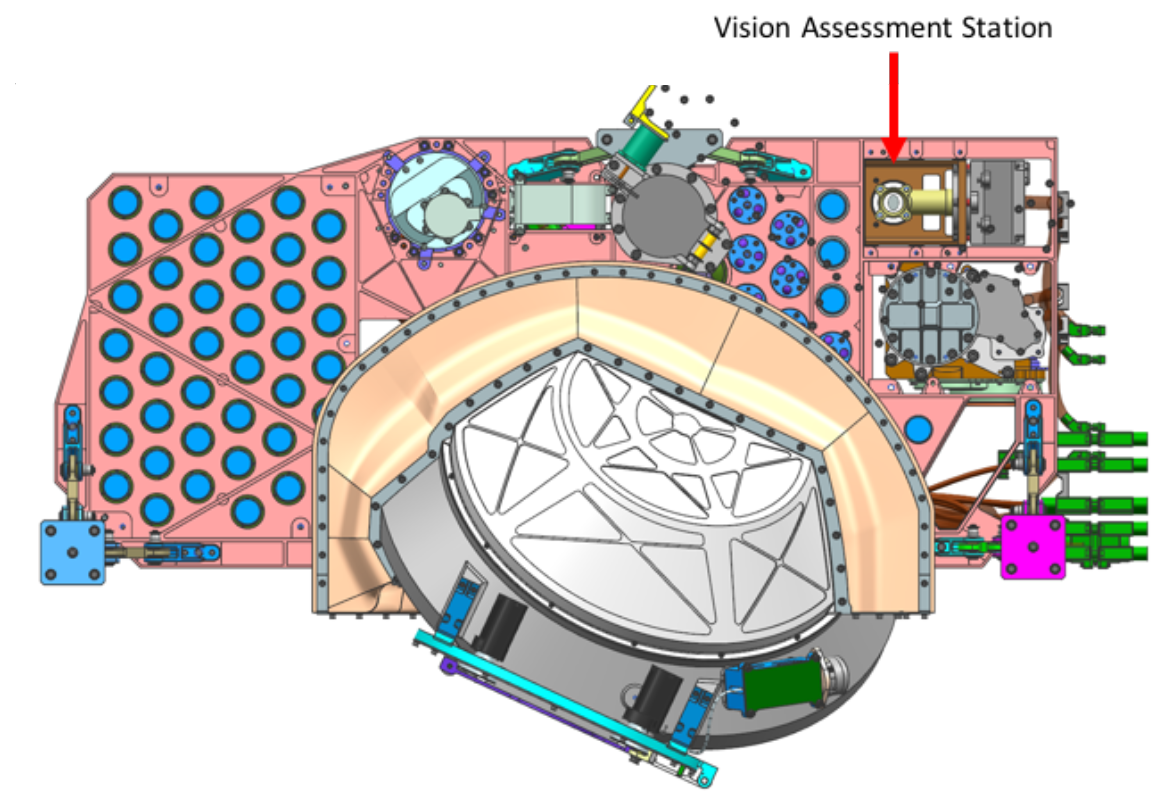
CacheCam location (yellow cylinder in Vision Assessment Station)
| CacheCam Operational Characteristics | |
|---|---|
| Characteristic | Value |
| Resolution (S x L) | 5120 x 3840 |
| Bit Depth | 12 |
| Field of View (FOV) | Horizontal 65 mm Vertical 49 mm Diagonal 81 mm |
| Angular Resolution |
Angular Resolution 12.5 um/pix at plan of focus ~0.51x magnification |
| Pixel Scale (center of FOV) | 12.5 microns/pixel |
| Focal Length | 32 mm |
| f/number | f/8 |
| Depth of Field | + / - 5 mm |
| Best Focus | 140 mm below illuminator mirror |